 Ergens rond het jaar 2000 heb ik een bouwpakket gekocht van een remote control (RC) auto, ofwel een afstandbestuurbare auto. Dat was destijds een scherpe aanbieding geweest bij Conrad van waarschijnlijk een uitlopend model van Tamiya. Het model is een soort race ding met gladde banden (slicks) en het was de instaplijn van Tamiya. Niet heel erg spannend, maar wel leuk om te bouwen. Dat had ik dus 16 jaar geleden al gedaan, maar één onderdeel ontbrak er sinds die tijd nog steeds: een snelheidsregelaar. Daardoor had de auto nog geen meter gereden.
Ergens rond het jaar 2000 heb ik een bouwpakket gekocht van een remote control (RC) auto, ofwel een afstandbestuurbare auto. Dat was destijds een scherpe aanbieding geweest bij Conrad van waarschijnlijk een uitlopend model van Tamiya. Het model is een soort race ding met gladde banden (slicks) en het was de instaplijn van Tamiya. Niet heel erg spannend, maar wel leuk om te bouwen. Dat had ik dus 16 jaar geleden al gedaan, maar één onderdeel ontbrak er sinds die tijd nog steeds: een snelheidsregelaar. Daardoor had de auto nog geen meter gereden.
Dit had ik toen al wel:
- Ta
 miya Chassis Foltec Fighter 1:10
miya Chassis Foltec Fighter 1:10 - 4 wheel drive met 380 type motor (geloof ik) en differentieel in overbrenging
- Sanwa Dash Saber remote control op 40MHz met servo voor sturen en servo voor mechanische snelheidsregelaar (ik wilde elektronisch, dus niet gebruikt)
- NiCd batterypack 7.2V

Ergens in de loop van 2015 kwam ik de bijna afgebouwde auto weer tegen achter de schotten. Dat kwam onder andere, omdat mijn buurjongens bezig waren met kleine drones. Ik had daar eens mee geholpen door een defecte motor te vervangen. Hij kon ook beelden opnemen met zijn camera en dat gaf mij inspiratie om eens mijn RC auto af te maken. Ik vond het wel een leuk idee om juist live beeld te kunnen zien op een draagbare monitor. Ongeveer zoals we dat ook hadden gebruikt bij de JOTA in 2015 onder een drone van Benno.
In dit artikel kan je nu stapsgewijs lezen wat ik aan de auto heb toegevoegd. En als er nog eens nieuwe ideeën komen, dan worden die onderin deze pagina toegevoegd. En leuke nieuwe ideeën zijn welkom in de reactievelden onderaan deze pagina.

Januari 2016 – Elektronische snelheidsregelaar (ESC)
Deze auto heeft nog een brushed motor. Daar moet de snelheidsregelaar voor geschikt zijn. Mijn motor is een vrij eenvoudig type uit de 380 serie (denk ik). Het hoefde in elk geval niet een hele zware regelaar te zijn. Hobbyking had een mooie. De specificaties kan ik niet meer terugvinden terwijl ik dit schrijf, blijkbaar zit hij al niet meer in het assortiment. Maar het was iets van 40A continue en 300A piek. De prijs was ergens tussen €10 en 25 euro.
Deze regelaar heeft wel allemaal opties die ik 16 jaar geleden nog niet zo goedkoop kon vinden: traploos regelbaar met PWM regeling, reverse en brake. Er zit tevens een spanningsregelaar in voor mijn Sanwa ontvanger (blauw in onderstaande foto).
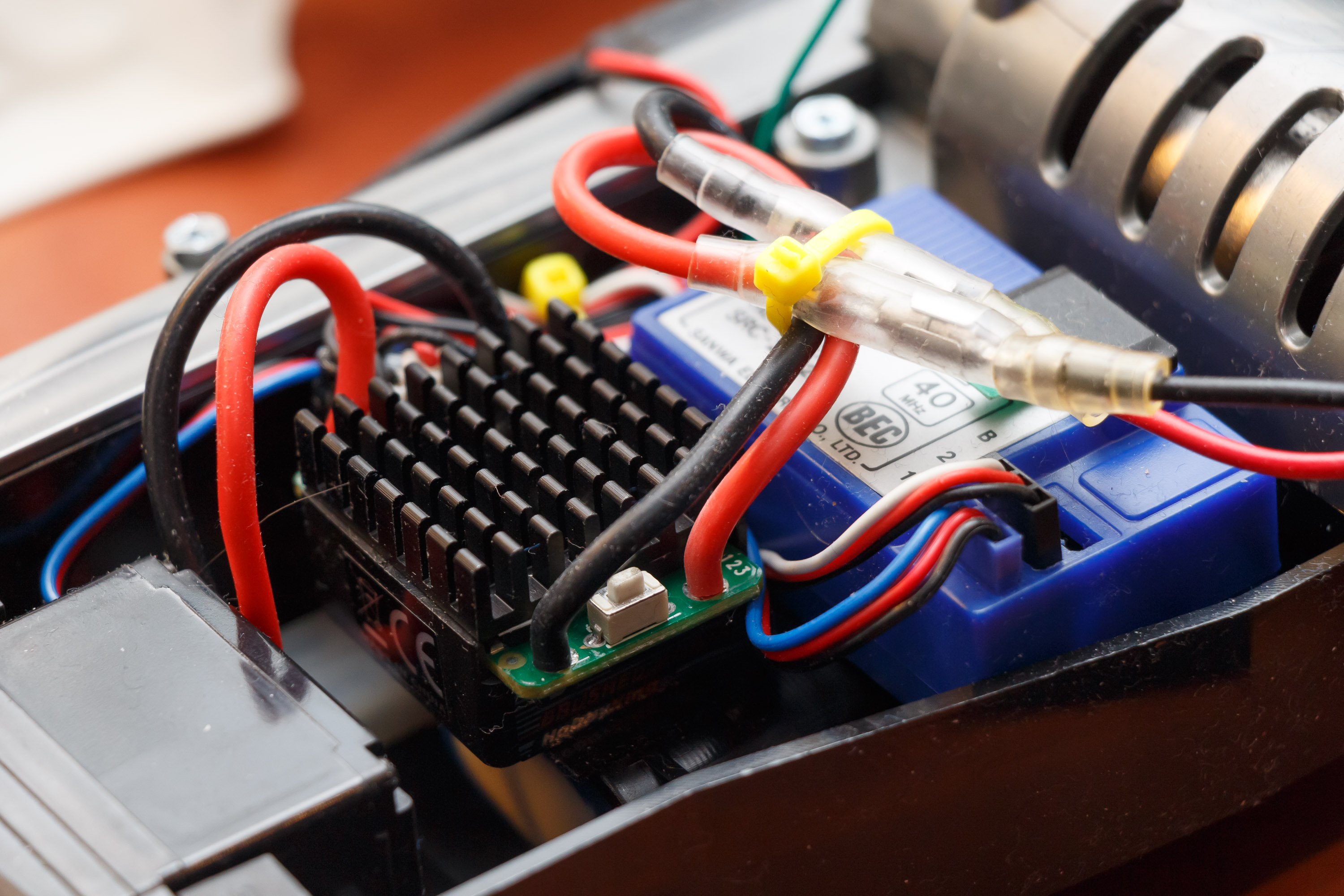
Weet iemand mij trouwens te vertellen waar die druktoets voor is? Ik merk niets als ik daarop druk. >> Het zou volgens Martijn een druktoets kunnen zijn waarmee je het type accu kan selecteren: NiCd of LiPo, waarschijnlijk om dan voor die laatste een beveiliging in te kunnen schakelen. Ik moet dat even testen.
De brake (rem) werkt erg goed. Hij herkent dat je hendel van de remote in reverse gaat, direct na het vooruit rijden. Hij legt dan eerder een belasting aan op de motor, dan dat hij spanning geeft aan de motor om achteruit te rijden. Slim gemaakt.
Om dit werkende te krijgen, moest ik echter wel de motorpolen omdraaien. De auto reed achteruit als ik vooruit wilde. Ik kon de remote wel op reverse zetten, maar dat ging weer niet goed met de brake functie in de ESC. Dus dan maar rood op zwart en zwart op rood van de motor. Deze motor maakt dat niks uit. De Sanwa ontvanger paste eerst niet direct op de stekker uit de ESC, maar dat was na wat vijlen opgelost. Gelukkig was hij wel pin compatible.
De auto rijdt echt fantastisch met deze regelaar. Ook op de meest lage snelheid. Ik heb op Youtube een oude video bekeken van deze auto met een oude type regelaar en dat is geen vergelijk. Die van mij reageert heel vel en trekt met volle kracht op. Vol gas gaat vrijwel altijd gepaard met slippende banden. Dat komt ook door de gladde slicks (profielloze banden). Dat maakt dat je leuk kan driften op een gladde vloer. Als jullie daar een video van willen zien, laat maar weten. Dan zal ik wel wat op Youtube uploaden.
Januari 2016 – Accu
Ik heb de NiCd accu al niet eens meer geprobeerd. Die zal wel gaar zijn na al die jaren. Ik heb deze 7,2V accu vervangen voor een 2 cel 7,4V LiPo exemplaar. De spanning ligt iets hoger en al helemaal als de LiPo accu helemaal vol zit (8,4V), maar dat kan de motor blijkbaar goed hebben.
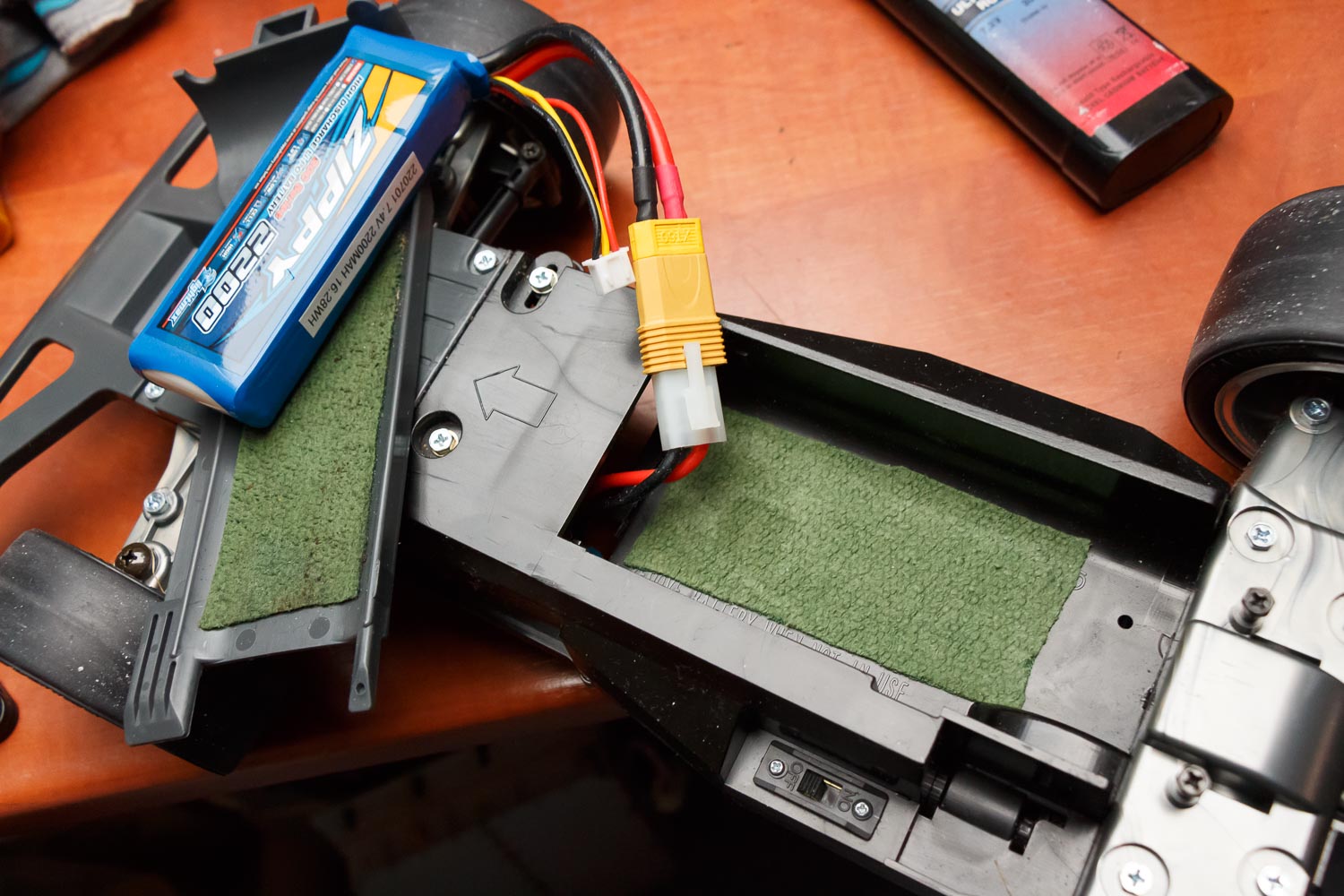
Het laden doe ik met een eenvoudig ladertje, zoals op onderstaande foto te zien is. Het laden gebeurt voor iedere cel afzonderlijk op de JST-XH plug, dus goed gebalanceerd. Voor de aansluiting van de snelheidsregelaar op de accu had ik een Tamiya plug nodig, dus heb ik een XT60 naar Tamiya verloopplugje aangeschaft.

Deze LiPo accu past veel beter in het compartiment van de auto, dan de grotere NiCd. Daar moest je altijd eerst de stekker naar binnen halen, de kap van de auto optillen en dan vastklemmen. Bij de kleinere LiPo kan de kabel met de connector gewoon naast de accu liggen en dus ook van buitenaf verbonden worden. Om het stuiteren en beschadigen van de accu tegen te gaan, heb ik stukjes zachte stof (oud sweatshirt) aangebracht in het accucompartiment, zie foto:
Februari/maart 2016 – Draadloze camera met live video (“FPV ground vehicle”)
FPV staat voor “First-Person View” en wordt meestal toegepast in modelvliegtuigen. FPV betekent dat je het model (voertuig of vliegtuig) kan besturen op een live monitor, alsof je zelf in het toestel zou zitten. Dat biedt veel meer mogelijkheden dan dat je van de grond probeert je model te volgen. En het ziet er natuurlijk fantastisch uit! Voor modelvliegtuigen heeft het enorme bereik van de zender een groot voordeel. Dat bereik verkrijg je doordat het model boven je vliegt en er meestal wel vrij zicht is tot op grote afstand. In een modelauto is dat wat lastiger, maar toch kan je redelijk goed FPV toepassen.
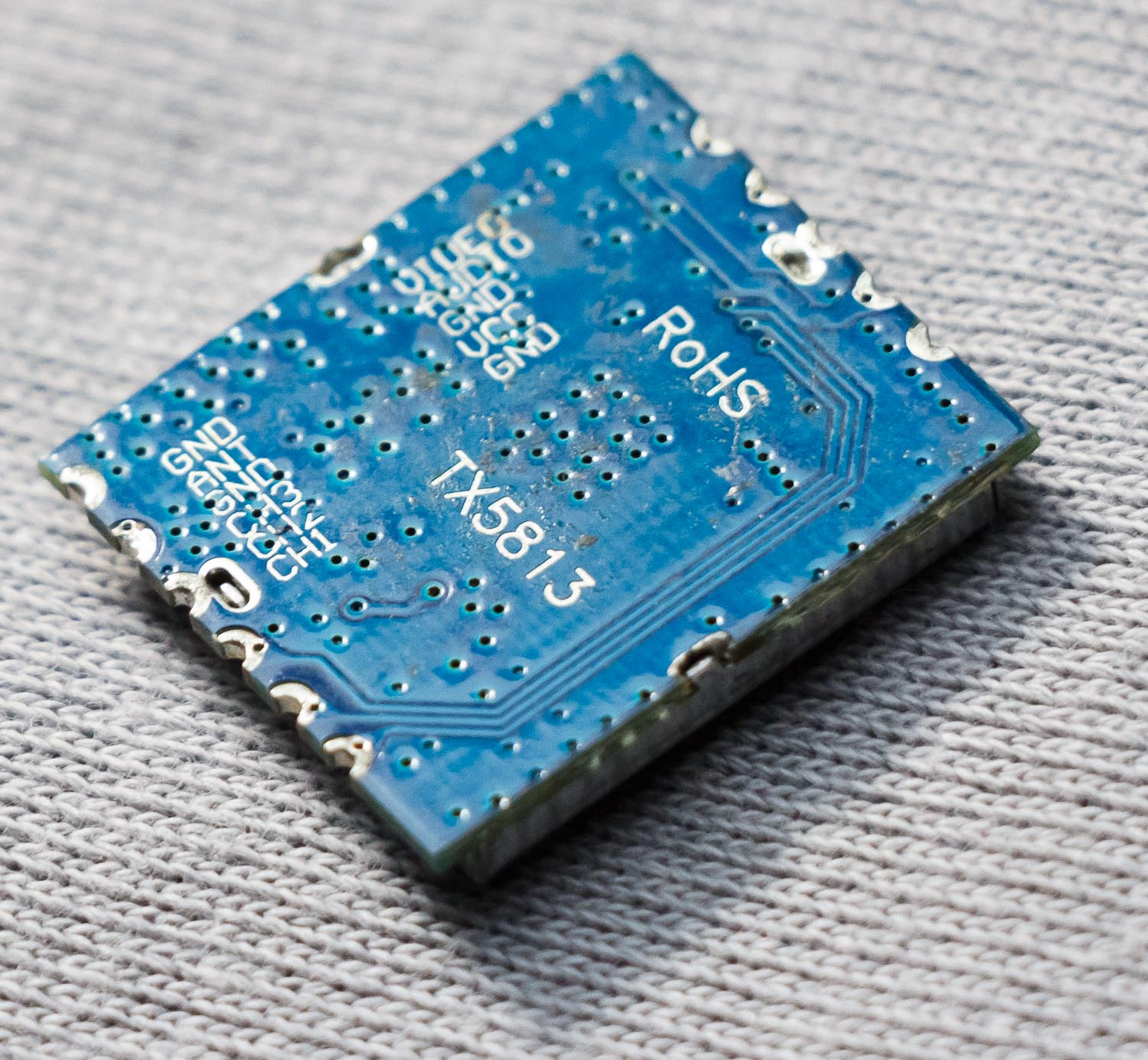
En dat heb ik dus gedaan. Ik ben op zoek gegaan naar de geschikte elektronica. Of eigenlijk heb ik eerder gekeken naar wat ik nog op voorraad had liggen. Ik wilde eerst aan de slag met Airwave modulen. Die zenden op ca. 5,8GHz en daarbij was het dan handig dat de kanaalindeling overeenkwam met mijn Airwave ontvangers die ik al gebruik voor andere toepassingen binnen Amateur Televisie. Toch heb ik gekozen voor de TX5813 module die ik ook nog had liggen (zie foto). Die was veel kleiner.
In een auto zou je eigenlijk nog beter een 13cm (ca. 2,4GHz) of 23cm (ca. 1,3 GHz) zender moduultje kunnen gebruiken, vanwege de langere golflengte. Je zou dan wat minder last kunnen hebben van obstakels. Toch heb ik wel voor 6cm (5,8GHz) gekozen, vanwege de volgende redenen:
- Dit is een vrij schone ISM band (veel beter dan 2,4GHz met al die WiFi verstopt in een kleine band)
- ISM, dus kan ik de zendertjes gewoon vergunningvrij gebruiken. Geen toestanden met roepletters perse in beeld en dat soort zaken die voor zendamateurs van toepassing zouden zijn. Mijn zender moet dan natuurlijk wel aan de ISM norm voldoen.
- De moduultjes voor 5,8GHz zijn zeer goed verkrijgbaar en kosten erg weinig.
- Het formaat van de moduultjes zijn over het algemeen kleiner.
- De antennes kunnen met een gering formaat ook nog efficiënt werken, vanwege de kortere golflengte.
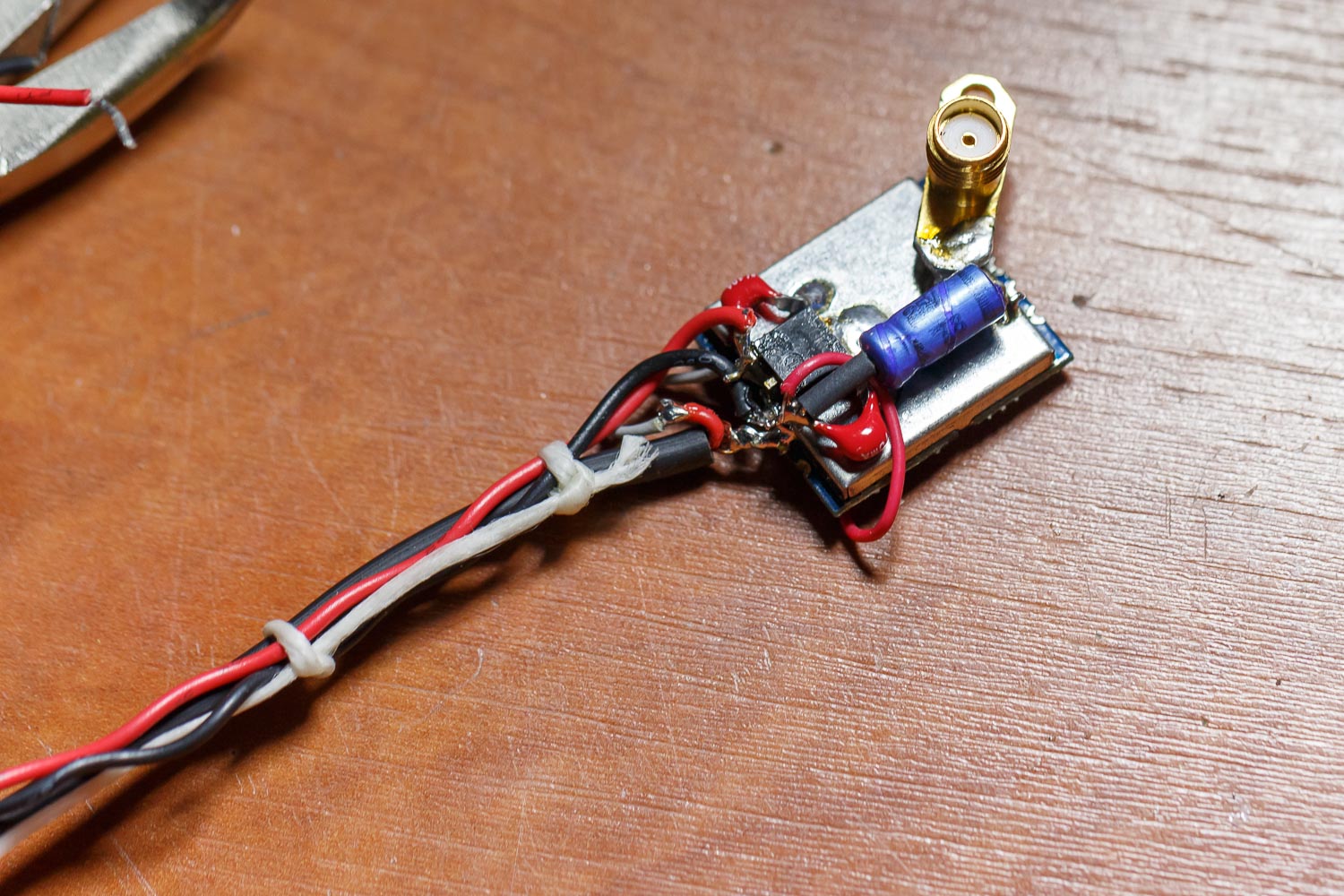
Ik had de kleine zender moduultjes TX5813 en de TX5823 een tijd geleden al eens aangeschaft voor ongeveer een tientje per stuk. Dit was een mooie gelegenheid om één van deze moduultjes eens te gaan gebruiken. De TX5813 heeft een zendvermogen van ca. 10mW en de TX5823 zou 200mW kunnen maken. Dat laatste geloof ik niet echt, maar 50mW zou hij zeker doen. Toch heb ik de 10mW versie ingebouwd, omdat ik eerst weleens wilde zien of dit concept wel zou werken. De module zou ik dan altijd nog kunnen vervangen mocht het bereik een beetje te beperkt wezen. De kanaalindeling van deze modulen is Boscam 8 kanalen. Die komen niet overeen met de Airwave 8 kanalen.
Voor wie trouwens van programmeren houdt; deze modulen zijn in tegenstelling tot de Airwave modulen ook met SPI vrij te programmeren. Soms moet je dan een kleine modificatie doen (weerstandje ofzo). Je kan dan wel alle frequenties vrij instellen.
Verder moet je ook een cameramodule, ontvanger (met de juiste kanaalindeling), antenne en een monitor hebben.
De cameramodule heb ik voor iets meer dan een tientje aangeschaft en is van AOMWAY.

Als ontvanger heb ik de RC832 gebruikt. Dat is een 32 kanaals ontvanger, die daarmee de meeste kanaalindelingen wel ondersteunt van de verschillende fabrikanten. Wel heb ik de RP-SMA connector vervangen voor een normale SMA connector.


 Als monitor heb ik een 4 inch LCD monitor gebruikt, die verkocht werd als monitor zonder blue screen, of black screen. Daarmee bedoel ik, dat het video niet onderdrukt wordt als het signaal te slecht wordt. Je wil immers niet dat je vliegtuig crasht als je video net op het randje zit. Ik heb dan weliswaar een auto, maar daarvoor geldt ook dat je in geval van een slecht signaal gewoon ruisend beeld wil blijven zien. Voor FPV heb je hele dure LCD monitoren en die zullen prima presteren op dit vlak. Mijn monitor was vrij goedkoop (minder dan 3 tientjes). Ze hebben de onderdrukker met een soort truukje omzeild. Het lijkt erop, dat ze een ruisbron gebruiken om de monitor wakker te houden. Daardoor gaat hij niet in standby mode en zie je zelfs ruis als je nog helemaal geen video aangesloten hebt. Zodra er ook maar iets van videosync in het aangeboden signaal binnenkomt, zie je de monitor de ruisbron uitschakelen en zie je je (zwakke) signaal. Dat gaat heel snel, omdat de monitor niet helemaal wakker hoeft te worden. De threshold om om te schakelen ligt ook heel laag. Als je echt wil kunnen detecteren op hele zwakke signalen, waarbij er nog nauwelijks iets van sync merkbaar is, dan is deze monitor toch ook nog niet geschikt (ATV contest). Maar voor FPV denk ik in bijna alle gevallen wel. Ik heb de monitor en de RC832 ontvanger bevestigd aan de Sanwa remote control. Ik voed beide apparaten uit de 8 penlights in de remote control. Ze worden met de aan-uit schakelaar van de remote control mee geschakeld. Voeden op deze penlights kan prima, omdat beide apparaten een schakelende spanningsregelaar aan boord hebben en spanningen accepteren van ca. 7,5 tot 16Volt. Het stroomverbruik is redelijk laag.
Als monitor heb ik een 4 inch LCD monitor gebruikt, die verkocht werd als monitor zonder blue screen, of black screen. Daarmee bedoel ik, dat het video niet onderdrukt wordt als het signaal te slecht wordt. Je wil immers niet dat je vliegtuig crasht als je video net op het randje zit. Ik heb dan weliswaar een auto, maar daarvoor geldt ook dat je in geval van een slecht signaal gewoon ruisend beeld wil blijven zien. Voor FPV heb je hele dure LCD monitoren en die zullen prima presteren op dit vlak. Mijn monitor was vrij goedkoop (minder dan 3 tientjes). Ze hebben de onderdrukker met een soort truukje omzeild. Het lijkt erop, dat ze een ruisbron gebruiken om de monitor wakker te houden. Daardoor gaat hij niet in standby mode en zie je zelfs ruis als je nog helemaal geen video aangesloten hebt. Zodra er ook maar iets van videosync in het aangeboden signaal binnenkomt, zie je de monitor de ruisbron uitschakelen en zie je je (zwakke) signaal. Dat gaat heel snel, omdat de monitor niet helemaal wakker hoeft te worden. De threshold om om te schakelen ligt ook heel laag. Als je echt wil kunnen detecteren op hele zwakke signalen, waarbij er nog nauwelijks iets van sync merkbaar is, dan is deze monitor toch ook nog niet geschikt (ATV contest). Maar voor FPV denk ik in bijna alle gevallen wel. Ik heb de monitor en de RC832 ontvanger bevestigd aan de Sanwa remote control. Ik voed beide apparaten uit de 8 penlights in de remote control. Ze worden met de aan-uit schakelaar van de remote control mee geschakeld. Voeden op deze penlights kan prima, omdat beide apparaten een schakelende spanningsregelaar aan boord hebben en spanningen accepteren van ca. 7,5 tot 16Volt. Het stroomverbruik is redelijk laag.
Hieronder een voorbeeld van hoe het er ongeveer uitziet. De video is van matige kwaliteit en is niet gemonteerd. Maar dan krijg je wel een indruk.
Februari 2016 – LED verlichting
Ik heb aan de voorzijde 10mm warmwitte LED’s geplaatst en aan de achterzijde 5mm rode LED’s. Dit zijn allemaal high brightness types en ze staan rustig ingesteld op ca. 10mA stroom. Vanwege de efficiëntie heb ik gekozen om per twee de LED’s in serie te zetten (voorzijde en achterzijde afzonderlijk), zodat de serieweerstand laag gekozen kan worden. De bron is immers ca. 7,4V. Alles is aangesloten op de voedingsdraden die ook voor de camera gebruikt is.




Openstaande ideeën
Sticker-metertjes op het dashboard vervangen voor bijvoorbeeld een batterijindicator van een paar LED’s. Of iets van het motortoerental weergeven. Het dashboard is immers te zien in beeld, dus dat moeten we dan ook maar gebruiken. Heb jij nog leuke ideeën wat ik eventueel zou kunnen uitbreiden en inbouwen? Hieronder is de mogelijkheid wat te schrijven.